







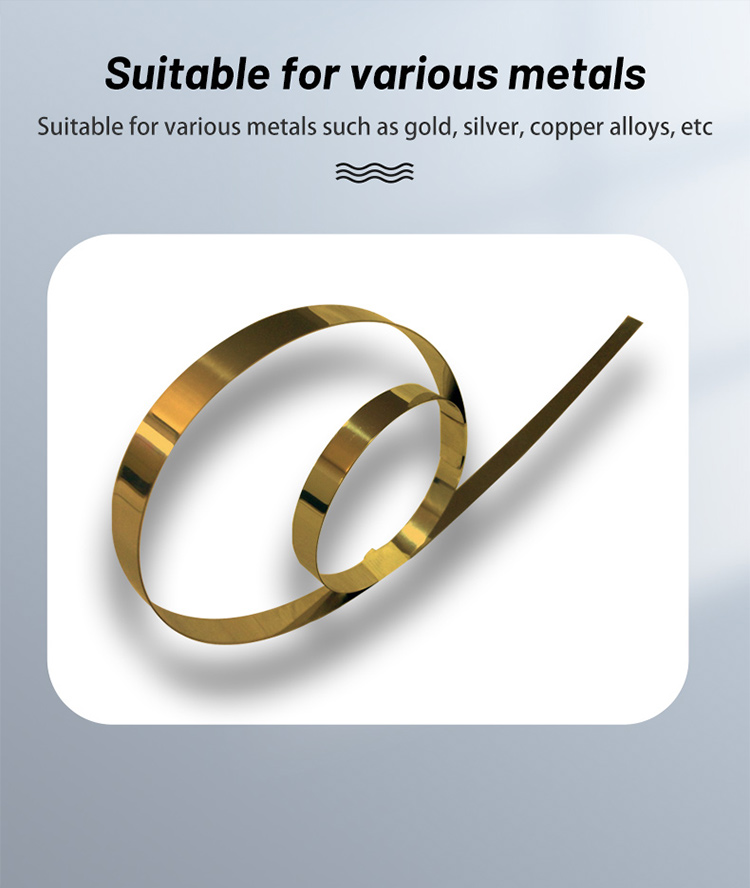
Hasung-Dört Başlykly Gymmatbaha Metallar Üçin Üznüksiz Zolakly Prokat Değirmeni
Enjamlaryň artykmaçlyklary:
1. Çydamly prokat stany: Ýokary gatylykly DC53 materialyndan ýasalyp, has uzak hyzmat möhletini we netijeliligini üpjün edýär
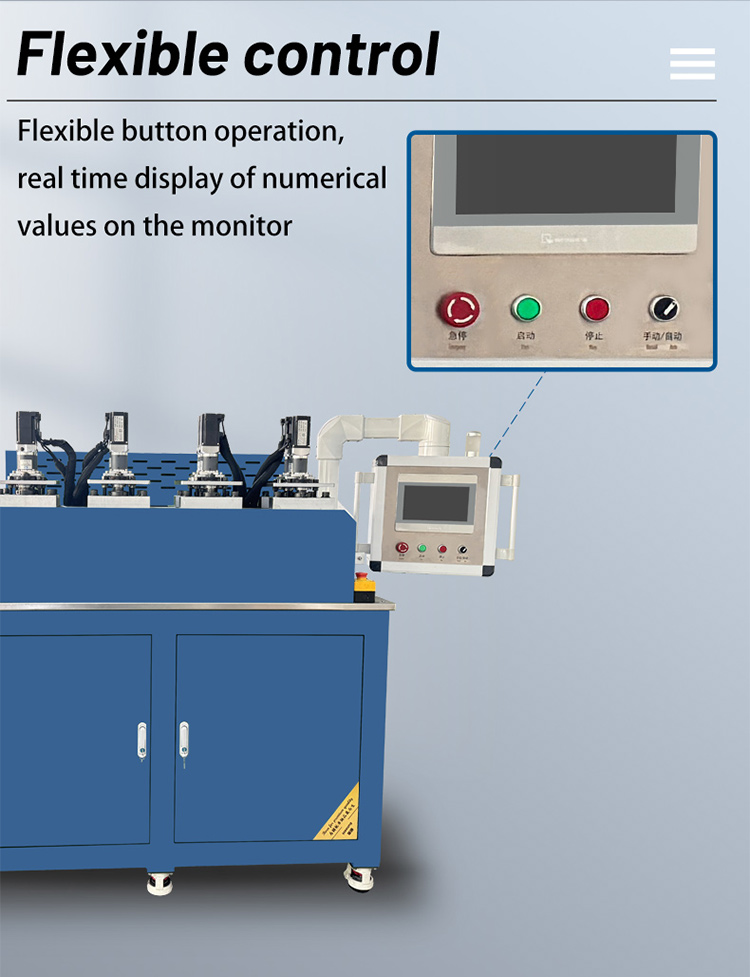
2. Akylly dolandyryş: Esasy tigirleme güýji serwo motorlar tarapyndan herekete getirilýär we Siemens PLC we sensor ekran arkaly dolandyrylýar. Sanly dolandyryş tigirleme stanagynyň beýikligini sazlaýar, taýýar önümiň galyňlygyny dolandyrýar we esasy tigirleme serwo motorynyň tizligini hasaplaýar.
3. Işçi güýjüni tygşytlaň: Taýýar önümi öndürmek üçin materiallary üznüksiz prokat fabrikasyna goýuň. Ýetmezçilik signalizasiýa funksiýasy bilen enjamlaşdyrylan.
4. Howpsuzlyk: Enjamlaryň töweregindäki howply ýerler gorag örtükleri bilen üpjün edilen
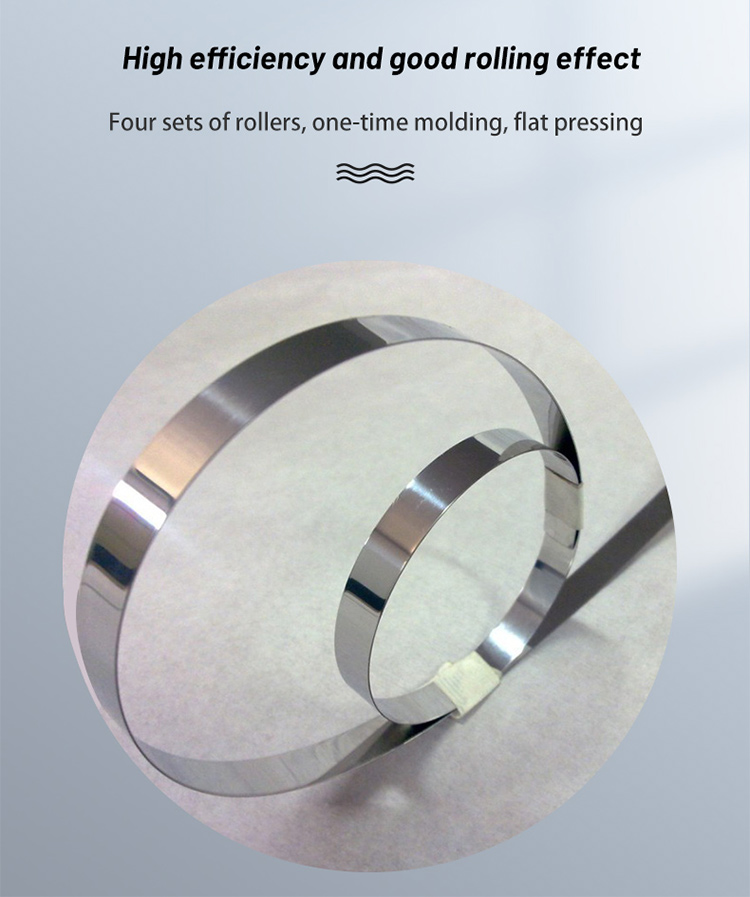
5. Ýokary takyklyk: Taýýar önümiň galyňlygyna çydamlylyk plus ýa-da minus 0.01 mm aralygynda dolandyrylýar. Komponentleriň işleniş takyklygyny berk gözegçilikde saklaň, şol bir modeliň böleklerini çalşyň we olary çalt saklaň.
6. PLC Siemens markaly 10 dýuýmlyk Weilun Tong sensor ekranyny ulanýar.
7. Enjamyň daşky görnüşiniň dizaýny giň we ýerlikli, list metal çarçuwalar bişiriji boýag bilen işlenen, bölekleri bolsa elektrokaplama ýa-da garaňkylaşdyrma bilen işlenen.
8. Göwresi galyň we enjamyň daşky görnüşiniň dizaýny giň we laýyk, bu bolsa enjamyň işleýiş wagtynda durnuklylygyny ýokarlandyrýar.
9. Enjam bölekleriniň önümçilik takyklygyny berk gözegçilikde saklaň, mehaniki bölekleri çyzgy takyklygyna laýyklykda işleň we şol bir modeliň çalşyrylmagyny üpjün ediň, bu bolsa tehniki hyzmaty amatly, wagt tygşytlaýjy we çalt edýär.
10. Ýaglamak üçin ýag goşuň we rulman podşipnikleri üçin 3-nji ýagy ulanyň
11. Esasy bölek podşipnikler nemes brendi INA-dan import edilen podşipnikler bolup, ýokary takyklygy we berkligi üpjün edýär
12. Ýönekeý we berk gurluş, kiçi meýdan eýelemek, pes ses we aňsat işlemek.
13. Ýokary basyş takyklygy, stoluň üstünde ýag we poslama garşy durmak üçin poslamaýan polatdan ýasalan ýag gap, ýag syzmasy ýok
14. Gyssagly togtatma howpsuzlyk enjamy, dolandyryş paneli, bir giriş we bir çykyş, jemi üç sany gyssagly togtatma açary bilen enjamlaşdyrylan.
Enjam parametrleri:
Elektrik üpjünçiligi: 380V, 50HZ 3 fazaly
Prokat stanogynyň güýji: 2.5KW x 4 toplum
Rolikli boşluk toparynyň güýjüni sazlaň: 200W X 4 topar
Rolikiň ölçegi (D * U) 108 * 110 mm
Rolikli toparlaryň sany: 4 topar
Rulon materialy/tekizligi: DC53/tekiz Ra0.4 Aýna ýüzleriniň 4 toplumy
Planşeti basmak üçin işjeň güýji dolandyrmak usuly: 4 sany serwo motorlar toplumy + Siemens PLC + 10 dýuýmlyk Weilun Tong sensor ekrany
Maksimum galyňlyk: 8 mm
Iň inçe tabletkanyň galyňlygy: 0.1 mm (altyn)
Taýýar önümiň galyňlygyna çydamlylyk: plus ýa-da minus 0.01mm
Iň gowy gysyş giňligi: 40 mm içinde
Servo sazlama rolik aralygynyň takyklygy: plus ýa-da minus 0.001mm
Basyş tizligi: minutda 0-100 metr (serwo motoryň tizligini sazlamak)
Taýýar önümi ölçemek usuly: el bilen ölçemek
Podşipnikleri ýaglamak usuly: Gaty ýag
Ýaglama usuly: awtomatiki ýag üpjünçiligi
Prokat stanogynyň ölçegleri: 1520 * 800 * 1630mm
Prokat stanogynyň agramy: takmynan 750KG


















biziň bilen habarlaşyň
- English
- French
- German
- Portuguese
- Spanish
- Russian
- Japanese
- Korean
- Arabic
- Irish
- Greek
- Turkish
- Italian
- Danish
- Romanian
- Indonesian
- Czech
- Afrikaans
- Swedish
- Polish
- Basque
- Catalan
- Esperanto
- Hindi
- Lao
- Albanian
- Amharic
- Armenian
- Azerbaijani
- Belarusian
- Bengali
- Bosnian
- Bulgarian
- Cebuano
- Chichewa
- Corsican
- Croatian
- Dutch
- Estonian
- Filipino
- Finnish
- Frisian
- Galician
- Georgian
- Gujarati
- Haitian
- Hausa
- Hawaiian
- Hebrew
- Hmong
- Hungarian
- Icelandic
- Igbo
- Javanese
- Kannada
- Kazakh
- Khmer
- Kurdish
- Kyrgyz
- Latin
- Latvian
- Lithuanian
- Luxembou..
- Macedonian
- Malagasy
- Malay
- Malayalam
- Maltese
- Maori
- Marathi
- Mongolian
- Burmese
- Nepali
- Norwegian
- Pashto
- Persian
- Punjabi
- Serbian
- Sesotho
- Sinhala
- Slovak
- Slovenian
- Somali
- Samoan
- Scots Gaelic
- Shona
- Sindhi
- Sundanese
- Swahili
- Tajik
- Tamil
- Telugu
- Thai
- Ukrainian
- Urdu
- Uzbek
- Vietnamese
- Welsh
- Xhosa
- Yiddish
- Yoruba
- Zulu
- Kinyarwanda
- Tatar
- Oriya
- Turkmen
- Uyghur